SPI, I2C, UART, I2S, GPIO, SDIO, CAN, solo lea este artículo
El autobús siempre se atasca en él. Las señales en este mundo son todas iguales, pero hay miles de autobuses, lo cual es un dolor de cabeza. En términos generales, existen tres tipos de buses: bus interno, bus del sistema y bus externo. El bus interno es el bus entre los chips periféricos del microordenador y el procesador, que se utiliza para la interconexión a nivel de chip; mientras que el bus del sistema es el bus entre las placas enchufables y la placa del sistema en el microordenador, y se utiliza para el intercambio mutuo a nivel de la placa enchufable. El bus externo es el bus entre el microordenador y el dispositivo externo. Como dispositivo, la microcomputadora intercambia información y datos con otros dispositivos a través del bus. Se utiliza para la interconexión a nivel de dispositivo.
Además del bus, también hay algunas interfaces, que son una colección de múltiples buses, o no se rechazan.
1. IPS
SPI (Serial Peripheral Interface): El método de bus serial síncrono propuesto por MOTOROLA. Puerto serie síncrono de alta velocidad. La interfaz de 3 a 4 cables, envío y recepción independientes, se puede sincronizar.
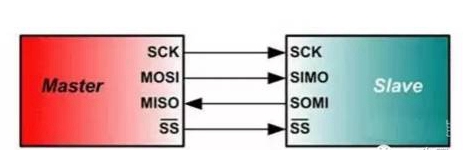
Es ampliamente utilizado debido a sus potentes funciones de hardware. En el instrumento inteligente y sistema de medición y control compuesto por microordenador de un solo chip. Si el requisito de velocidad no es alto, el modo de bus SPI es una buena opción. Puede guardar puertos de E / S, mejorar la cantidad de periféricos y el rendimiento del sistema. El bus SPI estándar consta de cuatro líneas: línea de reloj en serie (SCK), línea de entrada maestra / salida esclava (MISO). Salida maestra / línea de entrada esclava (MOSI) y señal de selección de chip (CS). Algunos chips de interfaz SPI tienen líneas de señal de interrupción o no tienen MOSI.
El bus SPI consta de tres líneas de señal: reloj en serie (SCLK), salida de datos en serie (SDO) y entrada de datos en serie (SDI). El bus SPI puede realizar la interconexión de múltiples dispositivos SPI. El dispositivo SPI que proporciona el reloj serie SPI es un dispositivo maestro o maestro SPI (maestro), y otros dispositivos son esclavos SPI o dispositivos esclavos (esclavo). Se puede realizar una comunicación full-duplex entre los dispositivos maestro y esclavo. Cuando hay varios dispositivos esclavos, se puede agregar una línea de selección de dispositivo esclavo. Si usa un puerto IO universal para simular el bus SPI, debe tener un puerto de salida (SDO), un puerto de entrada (SDI) y el otro puerto depende del tipo de dispositivo implementado. Si desea implementar un dispositivo maestro-esclavo, necesita un puerto de entrada y salida. , Si solo se realiza el dispositivo maestro, el puerto de salida es suficiente; si solo se realiza el dispositivo esclavo, solo se requiere el puerto de entrada.
2. I2C
I2C (Inter-Integrated Circuit): un bus en serie de dos cables desarrollado por PHILIPS, que se utiliza para conectar microcontroladores y sus dispositivos periféricos.
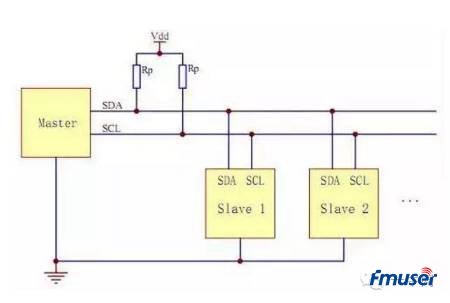
El bus I2C utiliza dos cables (SDA y SCL) para transferir información entre el bus y el dispositivo, la comunicación en serie entre el microcontrolador y los dispositivos externos o la transferencia de datos bidireccional entre el dispositivo maestro y el dispositivo esclavo. I2C es salida OD, la mayoría de I2C son de 2 hilos (reloj y datos), generalmente se utilizan para transmitir señales de control.
I2C es un bus multimaestro, por lo que cualquier dispositivo puede funcionar como maestro y controlar el bus. Cada dispositivo del bus tiene una dirección única y, según sus propias capacidades, pueden funcionar como transmisores o receptores. Pueden coexistir varios microcontroladores en el mismo bus I2C.
3 UART
UART: puerto serie asíncrono universal, comunicación bidireccional completa de acuerdo con la tasa de baudios estándar, velocidad lenta.
El bus UART es un puerto serie asíncrono, por lo que generalmente es mucho más complicado que los dos primeros puertos serie síncronos. Generalmente, consta de un generador de velocidad en baudios (la velocidad en baudios generada es igual a 16 veces la velocidad en baudios de transmisión), un receptor UART y un transmisor UART. Consta de dos cables en hardware, uno para enviar y otro para recibir.
UART es un chip que se usa para controlar computadoras y dispositivos seriales. Una cosa a tener en cuenta es que proporciona una interfaz de dispositivo de terminal de datos RS-232C para que la computadora pueda comunicarse con módems u otros dispositivos seriales que utilizan la interfaz RS-232C. Como parte de la interfaz, UART también proporciona las siguientes funciones:
Los datos en paralelo transmitidos desde la computadora se convierten en el flujo de datos en serie de salida. Convierta los datos en serie de fuera de la computadora en bytes para que los utilicen los dispositivos que usan datos en paralelo dentro de la computadora. Agregue un bit de paridad al flujo de datos en serie de salida y realice una verificación de paridad en el flujo de datos recibido desde el exterior. Agregue la marca de inicio-parada al flujo de datos de salida y elimine la marca de inicio-parada del flujo de datos recibido. Maneja la señal de interrupción enviada por el teclado o el mouse (el teclado y el mouse también son dispositivos en serie). Puede manejar el problema de administración de sincronización de la computadora y el dispositivo serial externo. Algunos UART de gama alta también proporcionan búferes para datos de entrada y salida. El UART más nuevo es 16550, que puede almacenar 16 bytes de datos en el búfer antes de que la computadora necesite procesar los datos. El UART habitual es 8250. Ahora bien, si compra un módem integrado, normalmente habrá un UART 16550 dentro del módem.
3. Comparación de SPI, I2C y UART
Los métodos de comunicación SPI e I2C son comunicaciones de corta distancia entre el chip y el chip o entre otros componentes como el sensor y el chip. SPI e IIC son comunicación de placa a placa, IIC a veces también hace comunicación de placa a placa, pero la distancia es muy corta, pero más de un metro, por ejemplo, algunas pantallas táctiles, pantallas LCD de teléfonos móviles, muchas películas delgadas Los cables usan IIC, I2C se puede usar para reemplazar el bus paralelo estándar, varios circuitos integrados y módulos funcionales que se pueden conectar. I2C es un bus multimaestro, por lo que cualquier dispositivo puede funcionar como maestro y controlar el bus. Cada dispositivo del bus tiene una dirección única y, según sus propias capacidades, pueden funcionar como transmisores o receptores. Pueden coexistir varios microcontroladores en el mismo bus I2C. Estas dos líneas pertenecen a la transmisión de baja velocidad.
El UART se utiliza en la comunicación entre dos dispositivos, como la comunicación entre un dispositivo y una computadora realizada con una microcomputadora de un solo chip. Esta comunicación se puede realizar a largas distancias. La velocidad UART es más rápida que las dos anteriores, hasta aproximadamente 100K. Se utiliza para comunicarse con la computadora y el dispositivo o entre la computadora y el cálculo, pero el alcance efectivo no será muy largo, unos 10 metros. La ventaja de la UART es que tiene una amplia gama de soporte y una estructura de diseño de programa. En pocas palabras, con el desarrollo de USB, UART está yendo cuesta abajo gradualmente.
5.I2S
I2S (Inter-IC Sound Bus) es un estándar de bus desarrollado por Philips para la transmisión de datos de audio entre dispositivos de audio digitales. La mayor parte es de 3 cables (además del reloj y los datos, también hay una señal de selección de canal izquierdo y derecho), I2S se utiliza principalmente para transmitir señales de audio. Como STB, DVD, MP3, etc. de uso común.

En el estándar I2S, se especifican tanto la especificación de la interfaz de hardware como el formato de los datos de audio digital. I2S tiene 3 señales principales: 1) Reloj serial SCLK, también llamado bit clock (BCLK), es decir, correspondiente a cada bit de datos de audio digital, SCLK tiene 1 pulso. La frecuencia de SCLK = 2 × frecuencia de muestreo × número de bits de muestreo. 2) El reloj de cuadro LRCK, (también llamado WS), se utiliza para cambiar los datos de los canales izquierdo y derecho. LRCK de "1" significa que se están transmitiendo los datos del canal izquierdo y "0" significa que se están transmitiendo los datos del canal derecho. La frecuencia de LRCK es igual a la frecuencia de muestreo. 3) Los datos en serie SDATA son los datos de audio expresados en complemento a dos. A veces, para sincronizar mejor los sistemas, se necesita transmitir otra señal MCLK, llamada reloj maestro, también llamado reloj del sistema (Sys Clock), que es 256 veces o 384 veces la frecuencia de muestreo.
6.GPIO
GPIO (entrada y salida de propósito general) o expansor de bus, que utiliza la interfaz estándar industrial I2C, SMBus o SPI para simplificar la expansión de los puertos de E / S.
Cuando el microcontrolador o el chipset no tiene suficientes puertos de E / S, o cuando el sistema necesita usar comunicación o control remoto en serie, los productos GPIO pueden proporcionar funciones adicionales de control y monitoreo. Cada puerto GPIO se puede configurar como entrada o salida por software. La línea de productos GPIO de Maxim incluye GPIO de 8 puertos a 28 puertos, proporcionando salida push-pull o salida de drenaje abierto. Disponible en un paquete QFN en miniatura de 3 mm x 3 mm.
(1) Las ventajas de GPIO (expansor de puertos):
① Bajo consumo de energía: GPIO tiene un menor consumo de energía (aproximadamente 1μA, mientras que la corriente de trabajo de μC es 100μA).
② Interfaz esclava IIC integrada: interfaz esclava IIC incorporada GPIO, puede funcionar a toda velocidad incluso en modo de espera.
③ Paquete pequeño: los dispositivos GPIO proporcionan el tamaño de paquete más pequeño: ¡QFN de 3 mm x 3 mm!
④ Bajo costo: ¡no tiene que pagar por funciones no utilizadas!
⑤ Listado rápido: no es necesario escribir códigos, documentos adicionales ni trabajos de mantenimiento.
Control de iluminación flexible: múltiples salidas PWM de alta resolución integradas.
⑥ Tiempo de respuesta predeterminable: acortar o determinar el tiempo de respuesta entre eventos externos e interrupciones.
⑦ Mejor efecto de iluminación: salida de corriente combinada para garantizar un brillo de pantalla uniforme.
⑧ Cableado simple: solo se requieren 2 buses IIC o 3 buses SPI
7. SDIO
SDIO es una interfaz de expansión de tipo SD. Además de poder conectarse a una tarjeta SD, también se puede conectar a dispositivos que admitan la interfaz SDIO. El propósito del zócalo no es solo insertar una tarjeta de memoria. Las PDA y computadoras portátiles que admiten la interfaz SDIO se pueden conectar a receptores GPS, adaptadores Wi-Fi o Bluetooth, módems, adaptadores LAN, lectores de códigos de barras, radios FM, receptores de TV, lectores de autenticación de radiofrecuencia o cámaras digitales y otros dispositivos que usan SD interfaces estándar.
El protocolo SDIO evoluciona y se actualiza a partir del protocolo de la tarjeta SD. Muchos lugares conservan el protocolo de lectura y escritura de la tarjeta SD. Al mismo tiempo, el protocolo SDIO agrega los comandos CMD52 y CMD53 al protocolo de la tarjeta SD. Debido a esto, una diferencia importante entre las especificaciones de las tarjetas SDIO y SD es la adición de estándares de baja velocidad. La aplicación de destino de las tarjetas de baja velocidad comienza con el hardware más pequeño para admitir capacidades de E / S de baja velocidad. Las tarjetas de baja velocidad admiten aplicaciones como módems, lectores de códigos de barras y receptores GPS. Las tarjetas de alta velocidad admiten tarjetas de red, tarjetas de TV y tarjetas "combinadas", etc. Las tarjetas combinadas se refieren a la memoria + SDIO.
Otra diferencia importante entre SDIO y la tarjeta SD SPEC es la adición de estándares de baja velocidad. La tarjeta SDIO solo necesita el modo de transmisión SPI y SD de 1 bit. La aplicación de destino de las tarjetas de baja velocidad es admitir capacidades de E / S de baja velocidad con un gasto mínimo de hardware. Las tarjetas de baja velocidad admiten aplicaciones como MODEM, escáneres de barras y receptores GPS. Para las tarjetas combinadas, la operación a velocidad completa y 4BIT son requisitos obligatorios para la memoria interna y la parte SDIO de la tarjeta. En dispositivos SDIO no combinados, la velocidad máxima solo debe alcanzar los 25M, y la velocidad máxima de la tarjeta combinada es la misma que la velocidad máxima de la tarjeta SD, que es superior a 25M.
8. PUEDE
CAN, el nombre completo es "Controller Area Network", es decir, Controller Area Network, que es uno de los buses de campo más utilizados en el mundo. Inicialmente, CAN fue diseñado como un microcontrolador de comunicación en el entorno automotriz, intercambiando información entre los diversos dispositivos de control electrónico ECU en el vehículo, formando una red de control electrónico automotriz. Por ejemplo, los dispositivos de control CAN están integrados en los sistemas de gestión del motor, los controladores de transmisión, el equipo de instrumentación y los sistemas de columna vertebral electrónica.
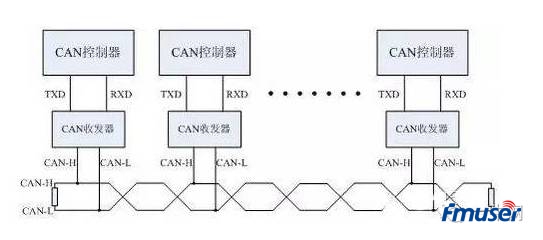
En una sola red compuesta por bus CAN, en teoría, se pueden conectar innumerables nodos. En aplicaciones prácticas, el número de nodos está limitado por las características eléctricas del hardware de la red. Por ejemplo, cuando se utiliza Philips P82C250 como un transceptor CAN, se permite la conexión de 110 nodos en la misma red. CAN puede proporcionar una velocidad de transmisión de datos de hasta 1 Mbit / s, lo que facilita mucho el control en tiempo real. Además, la función de verificación de errores del hardware también mejora la capacidad de CAN para resistir la interferencia electromagnética.
Características del bus CAN:
1) Puede funcionar en modo multimaestro. Cualquier nodo de la red puede enviar información de forma activa a otros nodos de la red en cualquier momento, independientemente del maestro y el esclavo, y el modo de comunicación es flexible.
2) Los nodos de la red se pueden dividir en diferentes prioridades para cumplir con diferentes requisitos en tiempo real.
3) Se adopta un mecanismo de estructura de bus de arbitraje de bits no destructivo. Cuando dos nodos transmiten información a la red al mismo tiempo, el nodo con menor prioridad detiene activamente la transmisión de datos, mientras que el nodo con mayor prioridad puede continuar transmitiendo datos sin verse afectado.
4) Los datos se pueden recibir en varios modos de transmisión: punto a punto, punto a multipunto y difusión global.
5) La distancia máxima de comunicación directa puede alcanzar los 10 km (velocidad por debajo de 4 Kbps).
6) La velocidad de comunicación puede alcanzar hasta 1 MB / s (la distancia más larga es de 40 m en este momento).



|
|
|
|
¿A qué distancia (largo) de la cubierta del transmisor?
El alcance de transmisión depende de muchos factores. La distancia real se basa en la instalación de la antena de altura, ganancia de antena, utilizando como medio de construcción y otras obstrucciones, la sensibilidad del receptor, la antena del receptor. La instalación de la antena más alta y el uso en el campo, la distancia será mucho más lejos.
Transmisor FM 5W ejemplo, el uso en la ciudad y la ciudad natal:
Tengo un cliente de uso del transmisor FM con antena 5W EE.UU. GP en su ciudad natal, y lo prueba con un coche, es cubrir 10km (6.21mile).
Puedo probar el transmisor de FM con antena GP 5W en mi ciudad natal, que cubren alrededor 2km (1.24mile).
Puedo probar el transmisor de FM con antena 5W médico de cabecera en la ciudad de Guangzhou, que sólo cubren alrededor 300meter (984ft).
A continuación se presentan el intervalo aproximado de diferentes transmisores de FM de potencia. (El rango es de diámetro)
Transmisor FM 0.1W ~ 5W: 100M ~ 1KM
5W ~ 15W FM Ttransmitter: 1KM ~ 3KM
Transmisor FM 15W ~ 80W: 3KM ~ 10KM
Transmisor FM 80W ~ 500W: 10KM ~ 30KM
Transmisor FM 500W ~ 1000W: 30KM ~ 50KM
Transmisor FM 1KW ~ 2KW: 50KM ~ 100KM
Transmisor FM 2KW ~ 5KW: 100KM ~ 150KM
Transmisor FM 5KW ~ 10KW: 150KM ~ 200KM
Cómo ponerse en contacto con nosotros para el transmisor?
Llámame + O 8618078869184
Envía un email [email protected]
1.How hasta dónde quiere cubrir de diámetro?
2.How alta de que la torre?
3.Where eres?
Y vamos a darle más consejo profesional.
Sobre Nosotros
FMUSER.ORG es una empresa de integración de sistemas que se enfoca en la transmisión inalámbrica de RF / equipos de audio / video de estudio / transmisión y procesamiento de datos. Ofrecemos todo tipo de asesoría, desde consultoría hasta la integración en rack, instalación, puesta en marcha y capacitación.
Ofrecemos transmisor de FM, transmisor de TV analógica, transmisor de TV digital, transmisor UHF VHF, antenas, conectores de cable coaxial, STL, procesamiento en el aire, productos de difusión para el estudio, monitoreo de señal RF, codificadores RDS, procesadores de audio y unidades de control de sitio remoto. Productos de IPTV, codificador / decodificador de video / audio, diseñados para satisfacer las necesidades de las grandes redes de transmisión internacionales y las pequeñas estaciones privadas.
Nuestra solución tiene estación de radio FM / estación de TV analógica / estación de TV digital / equipo de estudio de audio y video / enlace de transmisor de estudio / sistema de telemetría de transmisor / sistema de TV de hotel / transmisión en vivo de IPTV / transmisión en vivo de transmisión / videoconferencia / sistema de transmisión de CATV.
Estamos utilizando productos de tecnología avanzada para todos los sistemas, porque sabemos que la alta confiabilidad y el alto rendimiento son tan importantes para el sistema y la solución. Al mismo tiempo, también tenemos que asegurarnos de que nuestro sistema de productos tenga un precio muy razonable.
Tenemos clientes de emisoras públicas y comerciales, operadores de telecomunicaciones y autoridades de regulación, y también ofrecemos soluciones y productos a cientos de emisoras más pequeñas, locales y comunitarias.
FMUSER.ORG lleva más de 15 años exportando y tiene clientes en todo el mundo. Con 13 años de experiencia en este campo, contamos con un equipo profesional para resolver todo tipo de problemas del cliente. Nos dedicamos a ofrecer precios extremadamente razonables de productos y servicios profesionales. Email de contacto : [email protected]
Nuestra fábrica

Tenemos modernización de la fábrica. Que son bienvenidos a visitar nuestra fábrica cuando se llega a China.

En la actualidad, ya hay clientes 1095 en todo el mundo visitaron nuestra oficina Guangzhou Tianhe. Si usted viene a China, que son bienvenidos a visitarnos.
en la Feria

Esta es nuestra participación en 2012 Global Sources Hong Kong Electronics Fair . Los clientes de todo el mundo finalmente tener la oportunidad de reunirse.
¿Dónde está Fmuser?

Puede buscar estos números " 23.127460034623816,113.33224654197693 "en el mapa de Google, entonces puede encontrar nuestra oficina fmuser.
FMUSER oficina de Guangzhou se encuentra en el distrito de Tianhe, que es el centro del Cantón . Muy cerca En el correo electrónico “Su Cuenta de Usuario en su Nuevo Sistema XNUMXCX”. Feria de Cantón , Estación de tren de Guangzhou, Xiaobei carretera y Dashatou , solo necesito 10 minutos si toma TAXI . Bienvenidos amigos de todo el mundo a visitar y negociar.
Contacto: Blue Sky
Celular: + 8618078869184
WhatsApp: + 8618078869184
WeChat: + 8618078869184
E-mail: [email protected]
QQ: 727926717
Skype: sky198710021
Dirección: Sala de No.305 Huilan Edificio No.273 Huanpu carretera Guangzhou, China Código Postal: 510620
|
|
|
|
Inglés: Aceptamos todos los pagos, como PayPal, tarjeta de crédito, Western Union, Alipay, Money Bookers, T / T, LC, DP, DA, OA, Payoneer, si tiene alguna pregunta, comuníquese conmigo [email protected] o WhatsApp + 8618078869184
-
PayPal.  www.paypal.com www.paypal.com
Recomendamos que utilice PayPal para comprar nuestros artículos, el PayPal es una forma segura para comprar en Internet.
Cada página de nuestra lista de elementos de fondo en la parte superior tienen un logotipo de PayPal para pagar.
Tarjeta de crédito.Si usted no tiene PayPal, pero usted tiene tarjeta de crédito, también puede hacer clic en el botón amarillo de PayPal para pagar con su tarjeta de crédito.
-------------------------------------------------- -------------------
Pero si usted no tiene una tarjeta de crédito y no tener una cuenta de PayPal o difícil consiguió un accout PayPal, puede utilizar lo siguiente:
Western Union.  www.westernunion.com www.westernunion.com
Pagar por Western Union a mí:
Nombre / Nombre: Yingfeng
Apellido / Apellido / Nombre familiar: Zhang
Nombre completo: Yingfeng Zhang
País: China
Ciudad: Guangzhou
|
-------------------------------------------------- -------------------
T / T. Pagado por T / T (transferencia bancaria / transferencia telegráfica / transferencia bancaria)
Primera INFORMACIÓN BANCARIA (CUENTA DE LA EMPRESA):
SWIFT BIC: BKCHHKHHXXX
Nombre del banco: BANK OF CHINA (HONG KONG) LIMITED, HONG KONG
Dirección del banco: BANK OF CHINA TOWER, 1 GARDEN ROAD, CENTRAL, HONG KONG
CÓDIGO BANCO: 012
Nombre de cuenta: FMUSER INTERNATIONAL GROUP LIMITED
Cuenta NO. : 012-676-2-007855-0
-------------------------------------------------- -------------------
Segunda INFORMACIÓN BANCARIA (CUENTA DE LA EMPRESA):
Beneficiario: Fmuser International Group Inc
Número de cuenta: 44050158090900000337
Banco del beneficiario: China Construction Bank Guangdong Branch
Código SWIFT: PCBCCNBJGDX
Dirección: NO.553 Tianhe Road, Guangzhou, Guangdong, Tianhe District, China
** Nota: Cuando transfiera dinero a nuestra cuenta bancaria, NO escriba nada en el área de comentarios; de lo contrario, no podremos recibir el pago debido a la política gubernamental sobre comercio internacional.
|
|
|
|
* Este documento se enviará en 1 2-días de trabajo cuando el pago claro.
* Enviaremos a su dirección de PayPal. Si usted quiere cambiar la dirección, por favor, envíe su dirección correcta y número de teléfono a mi correo electrónico [email protected]
* Si los paquetes se encuentra por debajo 2kg, nos enviarán a través de correo aéreo, tardará aproximadamente 15-25days a la mano.
Si el paquete es más que 2kg, enviaremos a través de EMS, DHL, UPS, Fedex entrega rápida expresa, tomará alrededor de 7 ~ 15days a su lado.
Si el paquete de más de 100kg, vamos a enviar por DHL o el flete aéreo. Se llevará a cerca 3 ~ 7days a su lado.
Todos los paquetes son la forma china de Guangzhou.
* El paquete se enviará como "regalo" y se eliminará lo menos posible, el comprador no tiene que pagar "IMPUESTOS".
* Después de la nave, le enviaremos un correo electrónico y le dará el número de seguimiento.
|
|
|
Para garantía.
Contáctenos --- >> Devuélvanos el artículo --- >> Reciba y envíe otro reemplazo.
Nombre: Liu xiaoxia
Dirección: 305Fang HuiLanGe HuangPuDaDaoXi 273Hao TianHeQu Guangzhou, China.
Postal: 510620
Teléfono: + 8618078869184
Por favor, devuelva a esta dirección y escribir su PayPal, nombre, dirección problema en la nota: |
|